研究内容
当研究室では,以下のような研究を進めています.
人工筋制御
問題点 人工筋変位はヒステリシス特性により変位方向依存性が強く,さらにこの特性は負荷にも依存するために使いにくいアクチュエータです.
手法 変位特性の時変性も表現した適応的な数学モデルに基づいて制御系を設計する手法と,制御弁への入力電圧と人工筋変位の実験情報だけに基づいて制御系を設計するE-FRIT法,の二つを組合わせて高精度な変位制御系を設計する適応E-FRITを提案しました.
実証 特性の異なる人工筋に,提案手法によるコントローラを実装して実験を行った結果,矩形波状に時間変化する目標値変位に対して最大誤差0.1mmでの制御が可能となりました.繰り返し精度も非常に高い結果が得られました.
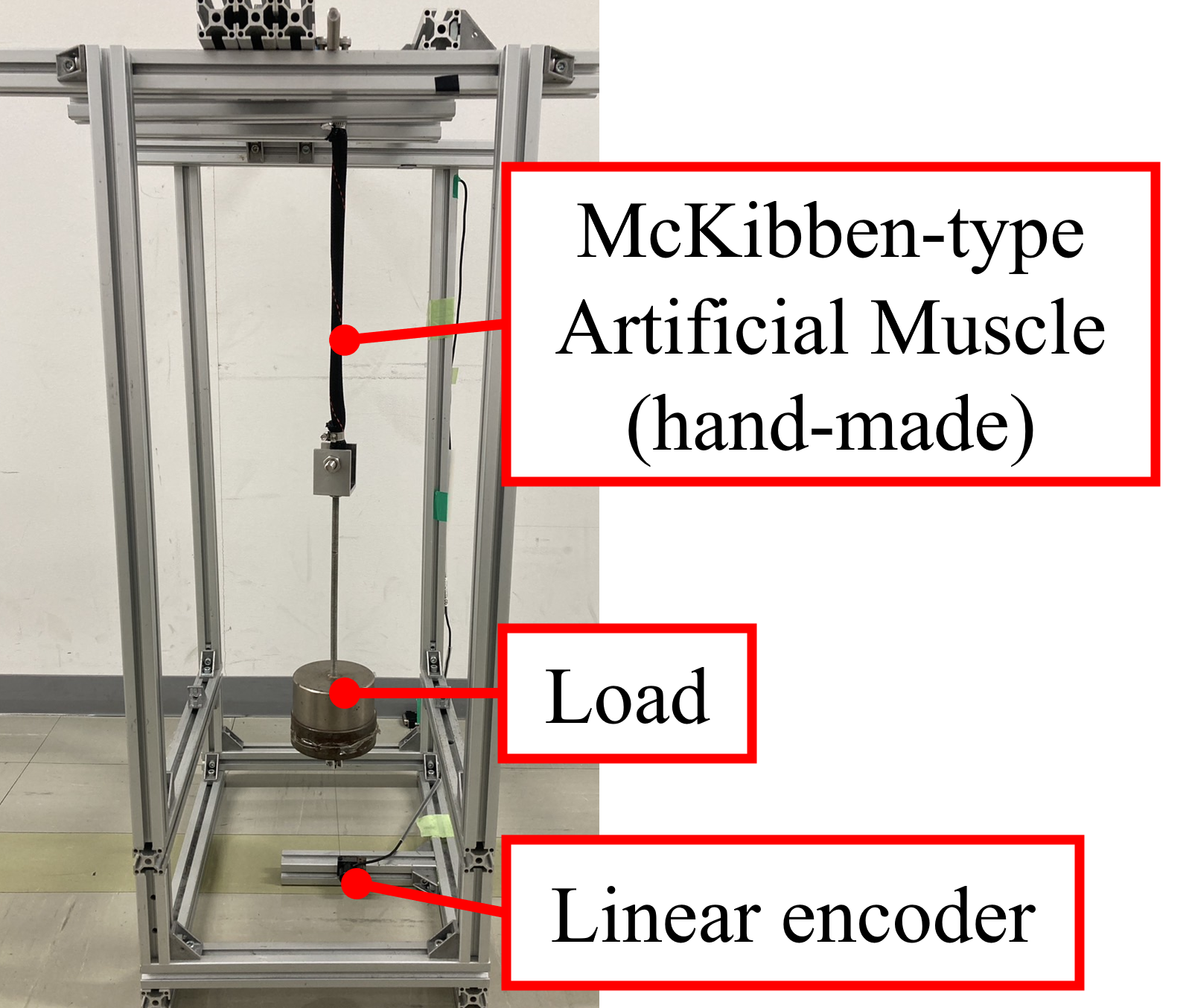
さらに知りたい ゴムチューブを樹脂繊維で編んだ素材で包み,一方を結束します.このときもう一方から内部のゴムチューブを膨張させると,パスカルの原理により均等に内圧が上昇しますが,樹脂繊維による半径方向への拘束により結果的に軸方向に収縮します.これにより動力を得るアクチュエーターの研究は世界で初めて「マッキベン型人工筋」として60年代から研究が始められ,そのほとんどが現在でも空気圧により制御されています.流体で駆動するため,作動流体を送ることができればアクチュエータの配置の自由度が高く,安価なことから注目されているアクチュエータです.当研究室では,これをコンプレッサを必要とする空気圧ではなく一般水道水圧で駆動することに着目し,環境に与える負荷が非常に小さなアクチュエーターとして利用する研究を続けています.下の図は人工筋の変位制御の実験装置で,上側に取り付けられた人工筋を水道水圧で制御し,下側のエンコーダで変位が計測できるようになっています.
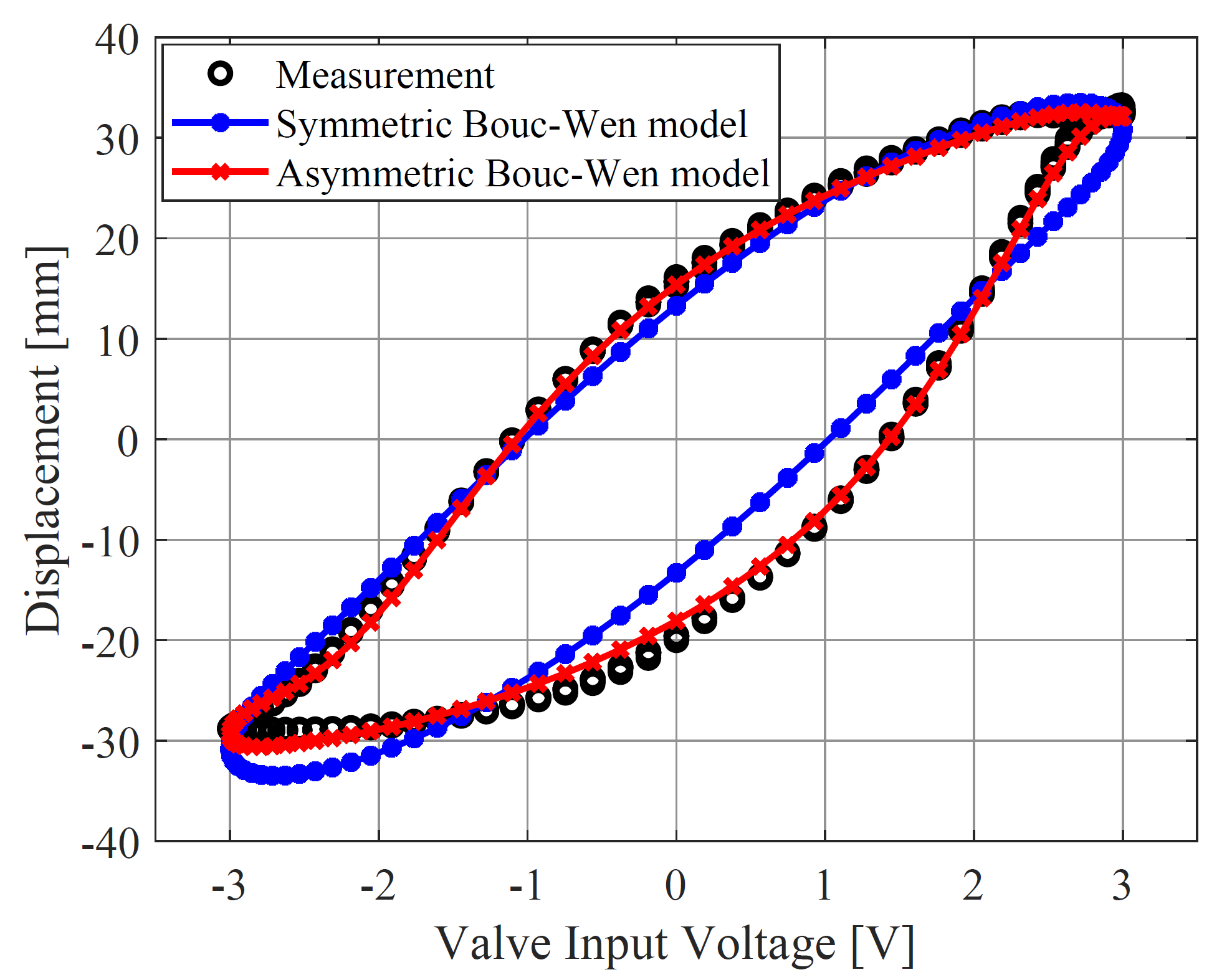
この人工筋は内側のチューブと外側の樹脂繊維との摩擦が大きく,圧力を上げた場合と下げた場合とで,内圧が同じでも変位が異なる特性(ヒステリシス特性)を持ちます.下の図は,横軸がどの程度の水道水を流入させて内圧を上げるかを制御する弁への入力電圧,縦軸が人工筋の変位量で,黒丸が実際に計測された変位です.この図から分かるように,黒丸の集合は歪んだ楕円に近い形になっており,非常に制御しにくいアクチュエータであり,精密に変位,速度あるいは推力を制御したい場合には大きな問題になります.
アプローチ
- 適応ヒステリシス補償
- Combined/Composite MRAC
- 適応モデル予測制御(Bouc-Wenモデル,モデルベース制御)
- E-FRIT (Extended Fictitious Reference Iterative Tuning), VRFT (Virtual Reference Fictitious Tuning), VIMTなどのデータ駆動型制御
- MFAC, MFC,
- データ駆動型モデルフリー適応制御(モデルベース制御とデータ駆動型制御の融合補償器)
- PE条件を要求しない適応パラメータ推定(Concurrent-Learning, Directional forgetting等の効果的なデータ忘却)
成果・採択論文
- S. Tsuruhara, K. Ito, “Hierarchical-Type Model Predictive Control and Experimental Evaluation for a Water-Hydraulic Artificial Muscle with Direct Data-Driven Adaptive Model Matching.”, International Journal of Automation Technology Vol. 19, No. 3, pp. 291-303, 2025.
- M. Sekine, S. Tsuruhara, K. Ito, “Optimized design of a pseudo‐linearization‐based model predictive controller: Direct data‐driven approach.” IET Control Theory & Applications Vol. 19, No. 1, 2025.
- M. Sekine, S. Tsuruhara, K. Ito, “MPC for Artificial Muscles Using FRIT based Optimized Pseudo Linearization Model.” IFAC-PapersOnLine Vol. 56, Issue 2, pp. 7264-7269, 2023.
- R. Inada, S. Tsuruhara, K. Ito, S. Ikeo, “Precise Displacement Control of Tap-Water-Driven Muscle Using Adaptive Model Predictive Control with Hysteresis Compensation.”, JFPS International Journal of Fluid Power System Vol. 15, No. 3, pp. 78-85, 2022.
- S. Tsuruhara, R. Inada, K. Ito, “Model Predictive Displacement Control Tuning for Tap-Water-Driven Artificial Muscle by Inverse Optimization with Adaptive Model Matching and its Contribution Analyses.”, International Journal of Automation Technology Vol. 16, No. 4, pp. 436-447, 2022.
- S. Tsuruhara, K. Ito, “Data-Driven Model-Free Adaptive Displacement Control for Tap-Water-Driven Artificial Muscle and Parameter Design Using Virtual Reference Feedback Tuning.”, Journal of Robotics and Mechatronics Vol. 34, No. 3, pp. 664-676, 2022.
油圧ショベルの自動制御
問題点 建設機械の心臓部として高い圧力を生成する油圧ポンプは様々な要求タスクに応じて作り出す圧力を時々刻々素早く変化させる必要があり,さらにこれをエンジンの最適燃費点に合わせて行うという非常に難しい要求を満たす必要があります. 従来手法での予測制御では目標圧力は周期性を持つことが前提となっており,実用的ではありませんでした.
手法 提案手法では中間信号の導入により上記の前提を完全に不要とし,任意目標圧力の変化に対しても油圧ポンプの圧力追従が可能となるような適応モデル予測制御系を提案しました.サーボ系を組み込んだ場合であっても任意圧力目標値追従のための重みの調整が非常に難しかったのですが,提案手法では非常に簡単に設計が可能となることが明らかになりました.
実証 実際の油圧ショベルに対して実証実験を行って性能を実証しました.従来の手法で設計した追従システムでは,目標圧力が変わると追従性は失われましたが,提案手法によるコントローラを実装して実験を行った結果,矩形波状,正弦波状,鋸波状に時間変化する目標値変位に対して非常に良い追従特性が得られました.
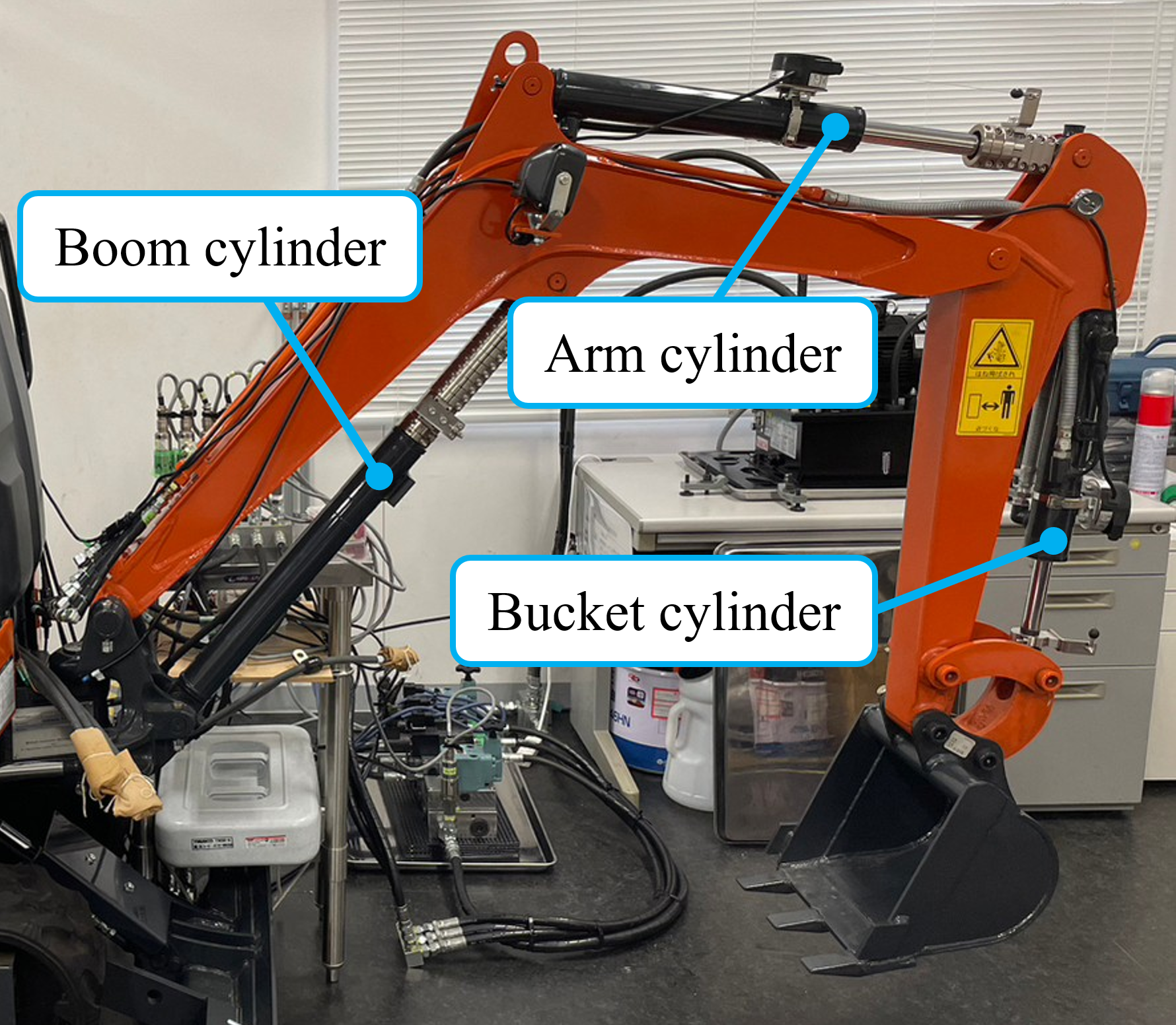
さらに知りたい 上記のような油圧ポンプの制御の他にも,建機制御には多くの課題が残されています.建機の中でも特に油圧ショベルはその汎用性から中心的な役割を担っており,街で見かける工事現場やトンネル工事でも非常に多く使われています.一方で作業を行う腕(作業機やフロント部と呼称)に当たる部分はブーム,アーム,バケット,の3つのシリンダ制御の組合わせで動いており,様々な仕事ができます.これを自動制御するには現在でも難しいところが多く,具体的にはある1つのシリンダ制御を行う際,別の2つのシリンダの動作の影響を受けること(干渉),土砂から受ける負荷の変動が大きいこと,などが挙げられます.ここでも,数学モデルを使って作業機の特性を表しておいてから制御系を作るモデルベース制御と,数学モデルを作らずに実際の計測データだけを元に直接コントローラーを設計するデータ駆動型制御,の二つに分類されますが,当研究室ではこの両者を組み合わせた手法を提案しています.
下の写真は実際に当実験室で研究に使っている超小型油圧ショベルの写真で,新しい制御系の設計ができたら,まずシミュレーションで検討を行い,そこで良い性能が出せる可能性が確認されたら実際に実機でそれを検証するというフローで研究が進められています.作業機の特性のモデル化という点に注目すると,作業機の自動制御だけではなく,省エネルギー化も含めて解決すべき問題が非常に多いものです.企業との共同研究テーマでもあり,毎月報告会が行われているホットな研究テーマです.
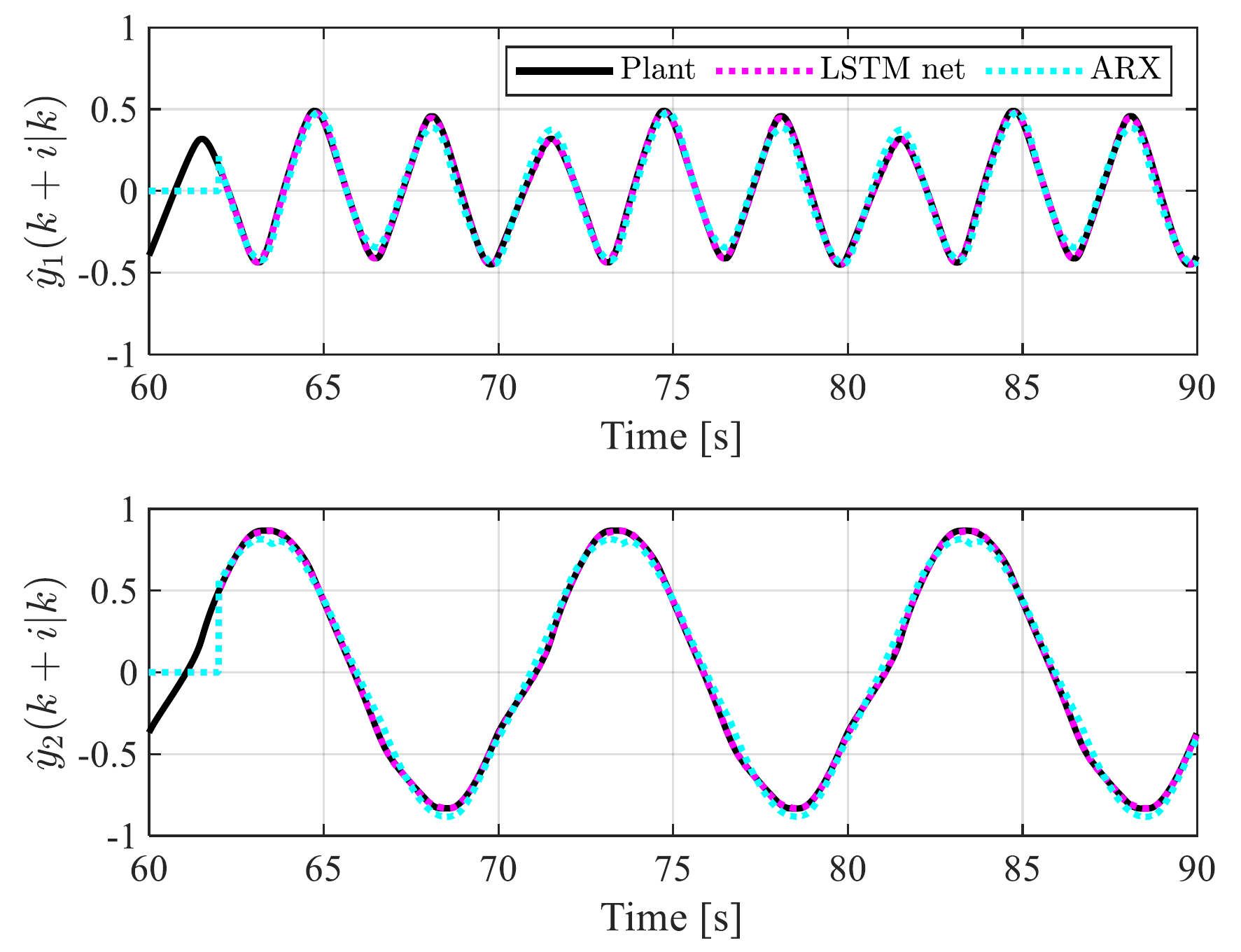
下のグラフは,LSTMによる作業機の数学モデルによる予測変位(マゼンタ破線)と従来用いていた線形予測モデル(水色破線)の200ステップ先(1ステップは0.01s)のそれぞれの予測値と実際に計測されたシリンダの変位(黒色実線)を比較したもので,上段がアームシリンダの変位予測,下段がバケットシリンダの変位予測,になります.両シリンダとも,LSTMによるモデルが非常に精度良く実際の変位を予測していることが分かります.これを元に姿勢制御を行います.
アプローチ
- LSTMによる作業機のモデル化,モデル予測制御
- 逆最適化適応モデル予測制御
- MFAC, E-FRIT, VRFT, VIMT
- MIMO適応FRIT(多変数系でのモデルベース制御とデータ駆動型制御の融合補償器)
成果・採択論文
- T. Yamada, K. Ito, “Designing an Axial Piston Pump Displacement Controller for Varying Reference Trajectory based on Model Predictive Control.”, International Journal of Automation Technology Vol. 19, No. 6, pp. xxx-yyy, 2025. (To appear)
- T. Yamada, R. Inada, K. Ito, “Designing a Model Predictive Controller for Displacement Control of Axial Piston Pump.”, International Journal of Automation Technology Vol. 18, No. 1, pp. 113-127, 2024.
- S. Hijikata, K. Ito, H. Murrenhoff, “Design Guideline and Investigation of Accumulator Parameters for a Novel Hybrid Architecture.”, JFPS International Journal of Fluid Power System Vol. 15, No. 1, pp. 17-25, 2022.
- S. Hijikata, K. Ito, H. Murrenhoff, “Investigation of Accumulator Parameters for a Novel Hybrid Architecture.”, Journal of Robotics and Mechatronics Vol. 32, No. 5, pp. 876-884, 2020.
ビニールハウス内の環境制御
問題点 ビニールハウス内の温度特性は外気温変化に対して影響を受けやすく,また温度帯域で放熱特性が変化する上に加温に利用されるヒータはOnとOffの二値だけであるため,精度の高い温度制御が難しいとされています. 従来手法では精度の高い数学モデルが得られにくく,それに基づく予測の精度が低いために高い制御性能が得られにくいものとなっていました.
手法 加温機への運転信号および外気温度を入力とし,室内温度を出力とする数学モデルを適応的に更新し,それに基づくモデル予測制御系を提案しました.さらに,この適応推定では新しい入出力情報をより信頼することでその精度を上げる工夫を導入しています.
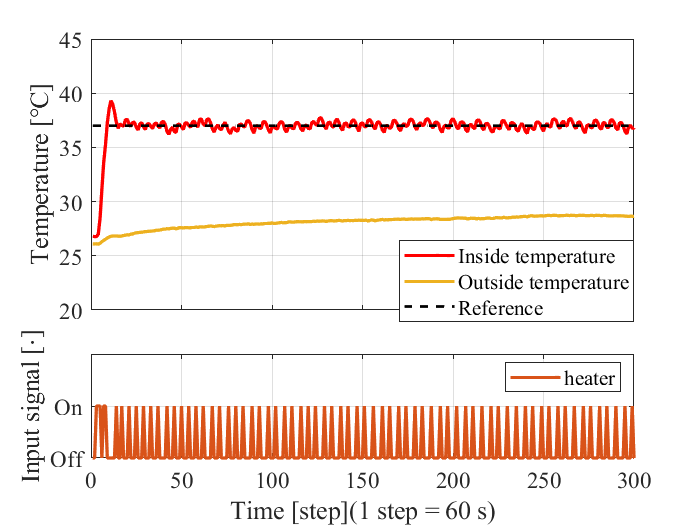
実証 実証用小型温室での実験において,従来は得られなかった目標温度への高い追従特性が得られることが示されました.下の図を見ると,高い精度で目標温度に沿っていることが分かります.
さらに知りたい スーパーマーケットでは冬でも様々な野菜,果物や花が買えますが,これはビニールハウスが上手く使われているためで,そのためにはハウス内の環境制御が重要になります.しかし,それを支えてきた農家は高齢化と後継者不足の問題を抱えており,カロリーベースで30%程度しかない食料自給率がさらに低下することが懸念されています.ハウス内では主に温度,湿度(飽差),二酸化炭素量,養分,日射等が制御されていますが,初めの二つは特に収穫に大きく影響し,ヒーター,加湿器,CO2発生器,養分を与える機械,遮光カーテン,窓の開閉機構などの装置制御に加え,栽培作物や成長度合いに応じた様々なノウハウがあります.かつ,これらの機器は多くがOn/Offの2つの状態しか持たないことが多く,制御しにくいシステムとなっています(エアコンなどのようなきめ細かい制御は不可能).これらを前提として考えると,①ベテランの農家さんのノウハウをデータベース化して制御する方法,②ハウス内の温湿度の特性をモデル化し,それを元に制御する方法,の二つが考えられます.①はどのようなデータを取り込むかが重要で,当研究室ではファジイ制御等を応用した研究を進めています.一方②は物理法則や機械学習により数学モデルを獲得し,モデル予測制御等で補償器を設計する研究を進めています.さらに,温度制御性能や湿度制御性能を維持したまま燃料消費を抑えるような制御も必要となります.下図は当研究室で実験用に使っているビニールハウスの写真で,提案・シミュレーションした制御方法の検証に使っています.

次のグラフは,実験用温室において5時間分の温度制御を行った実験結果です.この制御系では温度の特性を数学モデルで構築し,特性の変化に応じて適応的にモデルの情報を更新しながら一定の時間先までのハウス内温度を予測しながら最適な制御入力を生成する手法(適応モデル予測制御)を取っています.上側のグラフから,外気の変化に影響を受けずに目標の37℃に温度制御ができていることが分かります.下側のグラフはそのときのヒータへのOn/Off入力信号で,ハウス内温度を一定に保つために連続的に切り替えを行っていることが読み取れます.
アプローチ
- LSTMによる温室特性のモデル化
- 適応モデル予測制御
- メンバシップ関数の最適化を用いたFuzzy制御
成果・採択論文
K. Ito, T. Tabei, “Model Predictive Temperature and Humidity Control of Greenhouse with Ventilation.”, Procedia Computer Science Vol. 192, pp. 212-221, 2021.